Vous avez toujours rêvé de piloter un appareil que vous avez assemblé de vos propres mains ? Comment fabriquer un drone est une question que se posent de nombreux passionnés d’aéromodélisme, et la réponse va vous surprendre : c’est accessible, enrichissant, et moins compliqué qu’on ne l’imagine ! Construire son propre drone DIY permet non seulement d’économiser sur le budget, mais surtout de comprendre chaque rouage de votre machine volante. Dans ce tutoriel exhaustif, je vais vous accompagner dans toutes les étapes – du choix des pièces à la première mise en vol – pour réaliser un quadricoptère personnalisé qui répond parfaitement à vos besoins, que ce soit pour la prise de vue aérienne, le vol en immersion FPV ou simplement le plaisir du pilotage.
Pourquoi construire son propre drone ?

Les avantages du DIY
Monter un drone maison présente des bénéfices considérables par rapport à l’achat d’un modèle tout fait. Premièrement, la personnalisation totale : vous choisissez chaque composant selon vos objectifs – vitesse, autonomie, stabilité, capacité de charge. Ensuite, l’apprentissage technique devient votre meilleur atout : vous maîtriserez l’électronique, la programmation des contrôleurs et les principes aérodynamiques.
Autre point crucial : la réparabilité. Après un crash (et croyez-moi, ça arrive !), vous saurez exactement quoi remplacer et comment. Enfin, le rapport qualité-prix demeure excellent : pour un budget entre 150 et 500 euros, vous pouvez obtenir des performances rivalisant avec des appareils commerciaux bien plus onéreux.
Ce qu’il faut savoir avant de se lancer
Assembler un drone exige de la patience et quelques compétences de base. Vous devrez vous familiariser avec la soudure électronique (fer à souder, étain), comprendre les protocoles de connexion entre composants, et installer des logiciels de configuration comme Betaflight ou iNav. Prévoyez également un espace de travail organisé avec un bon éclairage et les outils appropriés.
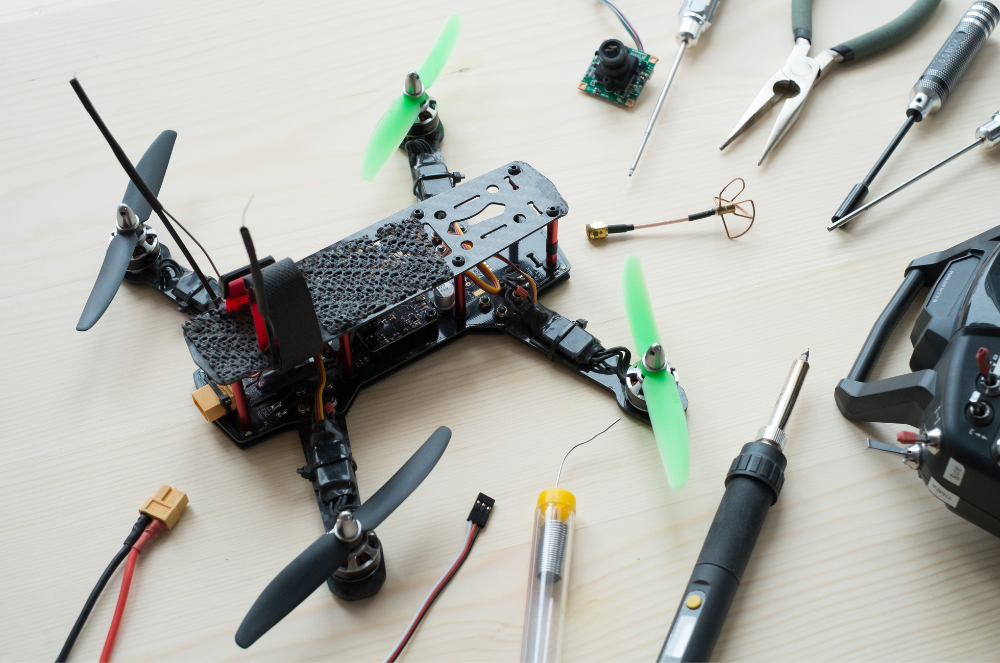
Les composants indispensables pour fabriquer un drone
Le châssis (frame) : fondation de votre projet
Le châssis constitue l’ossature qui supporte l’ensemble des éléments. Généralement fabriqué en fibre de carbone pour sa légèreté et sa résistance aux impacts, il existe aussi en plastique renforcé (plus économique mais moins durable). La taille se mesure en millimètres d’entraxe diagonal entre moteurs : un quadricoptère 250 mm convient au racing FPV, tandis qu’un 450 mm offre davantage de stabilité pour la photographie aérienne.
Veillez à ce que votre structure dispose de suffisamment d’espace pour accueillir tous les composants électroniques. Les modèles en X (Quad X) sont les plus répandus pour leur équilibre et maniabilité.
Les moteurs brushless : le cœur de la propulsion
Les moteurs brushless (sans balais) sont privilégiés pour leur fiabilité et efficacité énergétique. Deux critères principaux guident votre sélection :
- Taille du moteur : exprimée en millimètres (ex: 2212 signifie 22 mm de diamètre, 12 mm de hauteur)
- Valeur KV : indique les tours par minute par volt appliqué. Un KV élevé (2300-2600) offre de la réactivité pour la course, un KV bas (800-1200) génère plus de couple pour porter des charges
Sur un quadricoptère, vous aurez besoin de 4 moteurs : deux tournant dans le sens horaire (CW) et deux dans le sens antihoraire (CCW). Cette configuration assure la stabilité en annulant les couples de rotation.
Les hélices : choisir la bonne poussée
Les hélices transforment la rotation des moteurs en portance. Leurs caractéristiques influencent directement les performances :
- Diamètre et pas : une hélice 5045 mesure 5 pouces de diamètre avec un pas de 4,5 pouces
- Nombre de pales : 3 pales offrent un bon compromis vitesse/stabilité, 4 pales augmentent la poussée mais consomment plus
Vérifiez toujours la compatibilité entre vos hélices et la puissance des moteurs. Des hélices trop grandes sur des moteurs inadaptés peuvent causer une surchauffe.
ESC (Electronic Speed Controller) : régulateurs de vitesse
Les ESC sont des circuits électroniques cruciaux qui pilotent la vitesse et le sens de rotation de chaque moteur. Ils se positionnent entre le contrôleur de vol et les moteurs. On distingue :
- ESC individuels : un par moteur, offrant plus de flexibilité en cas de remplacement
- ESC 4-en-1 : tous intégrés sur une seule carte, plus compacts mais moins modulaires
Assurez-vous que l’ampérage maximum supporté par les ESC dépasse la consommation de vos moteurs (généralement entre 15A et 40A par moteur selon la configuration).
Le contrôleur de vol (FC) : cerveau du système
Le contrôleur de vol représente le cerveau de votre drone. Cette carte électronique embarque des capteurs (gyroscope, accéléromètre, parfois baromètre) et le firmware qui assure la stabilisation durant le pilotage. Les contrôleurs modernes utilisent des processeurs STM32 F4 ou F7.
Les firmwares les plus populaires incluent :
- Betaflight : idéal pour le vol FPV et le racing
- iNav : excellent pour la navigation GPS et les vols autonomes
- ArduPilot : pour des projets avancés avec waypoints
La batterie LiPo : autonomie et puissance
Les batteries Lithium Polymère (LiPo) fournissent l’énergie nécessaire. Leurs spécifications se décomposent ainsi :
- Nombre de cellules (S) : 3S (11,1V), 4S (14,8V), 6S (22,2V)… Plus de cellules = plus de puissance
- Capacité (mAh) : détermine l’autonomie (1300-2200 mAh typiquement pour un racing drone)
- Taux de décharge (C) : doit permettre de fournir le courant maximal nécessaire
Attention : les batteries LiPo exigent une manipulation prudente et un chargeur spécifique. Ne les déchargez jamais en dessous de 3,3V par cellule pour préserver leur durée de vie.
Radiocommande et récepteur : le lien pilote-drone
Pour commander votre appareil, vous avez besoin :
- D’un émetteur (radiocommande) : les modèles FrSky, Radiomaster ou TBS Tango 2 sont appréciés
- D’un récepteur compatible : il capte les signaux et les transmet au contrôleur de vol
Vérifiez la compatibilité des protocoles (SBUS, CRSF, etc.) et la portée suffisante pour votre utilisation prévue.
Modules FPV optionnels : vol en immersion
Si vous souhaitez piloter en FPV (First Person View), ajoutez :
- Une caméra FPV (résolution 1200TVL minimum)
- Un émetteur vidéo (VTX) (25-800 mW selon la portée désirée)
- Des lunettes ou un écran FPV pour recevoir le flux vidéo
Étapes d’assemblage de votre drone DIY
Préparation et organisation
Avant toute manipulation, rassemblez votre outillage :
- Fer à souder avec température réglable (350-380°C)
- Étain de qualité (flux sans plomb)
- Pince coupante, tournevis de précision
- Multimètre pour vérifier les connexions
- Smoke stopper (vivement recommandé pour éviter les courts-circuits catastrophiques)
Organisez votre espace de travail avec un bon éclairage et une station « mains libres » pour maintenir les pièces pendant la soudure.
Montage du châssis et fixation des moteurs
Commencez par assembler le châssis selon les instructions du fabricant. Marquez ensuite l’emplacement précis de chaque moteur en respectant la disposition Quad X : les moteurs diagonalement opposés tournent dans le même sens.
Fixez solidement les moteurs avec les vis fournies. Astuce importante : utilisez du frein-filet (Loctite) sur les vis pour éviter qu’elles ne se desserrent avec les vibrations.
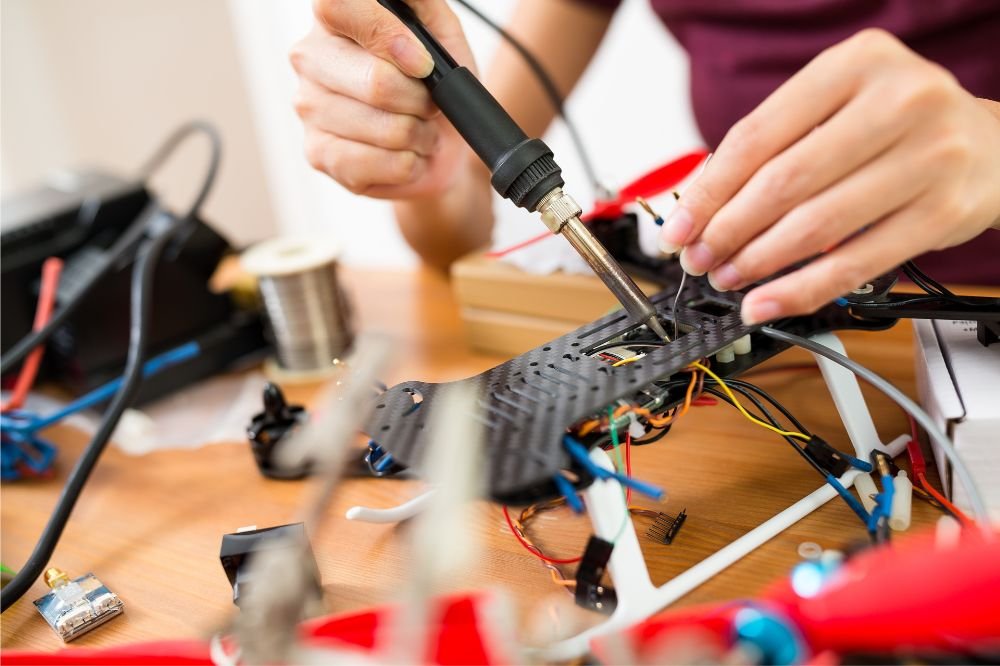
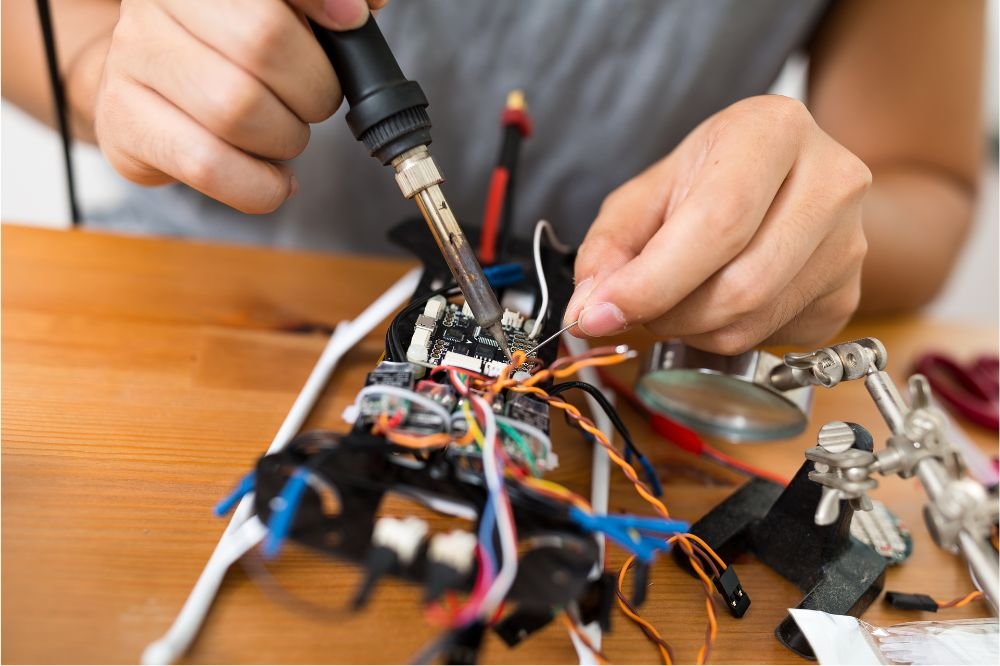
Soudure des ESC et câblage des moteurs
Étape délicate mais essentielle : soudez les trois fils de chaque moteur aux pads correspondants sur les ESC. Le sens de connexion détermine la rotation du moteur – si un moteur tourne à l’envers, inversez simplement deux fils quelconques.
Reliez ensuite les ESC au contrôleur de vol :
- Fils de signal (généralement blanc/jaune) vers les pads moteurs du FC
- Alimentation positive (rouge) et négative (noir) vers les rails d’alimentation
Isolez soigneusement toutes les soudures avec de la gaine thermorétractable pour prévenir les courts-circuits.
Installation du contrôleur de vol
Positionnez le contrôleur de vol au centre géométrique du châssis, idéalement avec des amortisseurs en caoutchouc pour absorber les vibrations. Orientez-le correctement : la flèche indiquant l’avant doit pointer vers l’avant du drone.
Connectez le récepteur radio à un port UART disponible sur le FC (consultez le schéma de votre carte pour identifier TX et RX).
Branchement de la batterie et vérifications
Soudez un connecteur XT60 (ou XT30 pour les petits drones) sur les fils d’alimentation principaux. Ajoutez idéalement un condensateur 1000µF en parallèle pour filtrer les pics de tension.
AVANT le premier branchement : utilisez un smoke stopper ou au minimum vérifiez au multimètre qu’il n’y a pas de court-circuit entre positif et négatif.
Installation des hélices
Montez les hélices en dernier, juste avant les tests au sol. Respectez scrupuleusement le sens de rotation indiqué sur chaque pale – une erreur courante chez les débutants. Serrez les écrous modérément : trop serré risque d’endommager le filetage du moteur.

Configuration logicielle : de Betaflight à l’envol
Installation et mise à jour du firmware
Téléchargez Betaflight Configurator depuis le site officiel. Connectez votre drone via USB et vérifiez la connexion (port COM détecté).
Dans l’onglet « Firmware Flasher » :
- Sélectionnez le modèle exact de votre contrôleur de vol
- Choisissez la version la plus récente stable
- Cochez « Full chip erase »
- Cliquez sur « Flash firmware »
Attendez la fin du processus sans débrancher le câble USB.
Calibrage de l’accéléromètre et du gyroscope
Rendez-vous dans l’onglet « Setup » de Betaflight. Placez votre drone sur une surface parfaitement plane et stable, puis cliquez sur « Calibrate Accelerometer ». Cette opération prend quelques secondes et garantit que le drone connaît son niveau de référence.
Vérifiez ensuite l’orientation en inclinant manuellement le drone : le modèle 3D affiché doit reproduire fidèlement vos mouvements. Sinon, ajustez le paramètre « Yaw » dans l’onglet « Configuration ».
Configuration des ports et périphériques
Onglet « Ports » : assignez vos périphériques aux bons UART :
- Serial RX sur l’UART où est connecté votre récepteur radio
- ESC Sensor si vous utilisez un ESC 4-en-1 avec télémétrie
- GPS si vous avez ajouté un module de navigation
Sauvegardez avec « Save and Reboot » après chaque modification.
Réglage des modes de vol
Dans l’onglet « Modes », configurez au minimum :
- ARM : interrupteur qui autorise le démarrage des moteurs (impératif pour la sécurité)
- ANGLE ou HORIZON : modes stabilisés recommandés pour débuter
- ACRO : mode manuel pour pilotes expérimentés
Testez chaque interrupteur avec votre radiocommande pour vérifier que les modes s’activent correctement (indicateurs passant du gris au bleu).
Test des moteurs et ajustements finaux
RETIREZ LES HÉLICES pour cette étape ! Dans l’onglet « Motors », vous pouvez tester la rotation de chaque moteur individuellement. Vérifiez :
- Tous les moteurs tournent dans le bon sens (référez-vous au schéma Quad X)
- Aucune vibration anormale
- Les ESC ne chauffent pas excessivement
Si un moteur tourne à l’envers, inversez deux fils quelconques de ce moteur sur l’ESC.
Premier vol et réglages progressifs
Vérifications pré-vol essentielles
Avant de mettre les gaz, contrôlez systématiquement :
- Batterie chargée (jamais en dessous de 3,7V par cellule)
- Hélices solidement fixées et non endommagées
- Câbles bien attachés avec des colliers rilsan
- Zone de vol dégagée, sans personnes à proximité
- Conditions météo favorables (vent faible pour débuter)
Vol d’essai : mode stabilisé
Choisissez un espace extérieur ouvert pour vos premiers vols. Commencez en mode ANGLE (auto-niveaux) qui facilite le contrôle. Armez le drone avec votre interrupteur, montez doucement les gaz jusqu’au décollage.
Observez le comportement :
- Le drone dérive-t-il dans une direction ? → Ajustez les trims sur la radiocommande
- Vibre-t-il beaucoup ? → Vérifiez l’équilibrage des hélices
- Réagit-il trop brusquement ? → Réduisez les taux dans Betaflight
Réglages PID : affiner la stabilité
Les paramètres PID (Proportionnel, Intégral, Dérivé) déterminent comment le drone réagit aux commandes et perturbations. Pour débuter, les valeurs par défaut de Betaflight fonctionnent généralement bien.
Si nécessaire, ajustez progressivement :
- P (proportionnel) : réactivité aux commandes
- I (intégral) : correction des dérives constantes
- D (dérivé) : amortissement des oscillations
Modifiez un paramètre à la fois et testez après chaque changement.
Améliorations et fonctionnalités avancées
Une fois votre drone volant correctement, envisagez ces upgrades :
Intégrez un module GPS avec magnétomètre pour activer des modes comme :
- Return to Home (RTH) : retour automatique au point de décollage
- Position Hold : maintien stationnaire géolocalisé
- Mission Planning : vol autonome sur waypoints programmés
Le GPS se connecte à un UART disponible. Avec iNav, vous bénéficiez de fonctionnalités de navigation particulièrement abouties.
Capteurs de distance pour évitement d’obstacles
Des capteurs ultrasoniques ou un système LiDAR peuvent détecter les obstacles et prévenir les collisions. Ces modules nécessitent une configuration avancée et un contrôleur compatible.
Système de télémétrie
La télémétrie renvoie des données en temps réel vers votre radiocommande : niveau de batterie, altitude, distance, vitesse… Protocoles courants : FrSky S.PORT, Crossfire (CRSF), ou MAVLink.
En résumé
Fabriquer un drone DIY représente une aventure technique passionnante qui allie électronique, programmation et pilotage. Vous avez découvert comment sélectionner les composants essentiels – châssis, moteurs, ESC, contrôleur de vol, batterie – puis les assembler méthodiquement avec les bonnes pratiques de soudure et de câblage. La configuration logicielle via Betaflight (ou iNav) transforme ensuite cet amas de pièces en machine volante stable et performante.
N’oubliez pas : la patience demeure votre meilleur allié. Les premiers crashs font partie de l’apprentissage, mais avec un drone que vous avez construit vous-même, vous saurez exactement comment le réparer et l’améliorer. Vous voilà désormais équipé pour créer votre propre quadricoptère personnalisé !
FAQ : Vos questions sur la fabrication d’un drone
Quel est le budget nécessaire pour fabriquer un drone ?
Le coût d’un drone DIY varie entre 150 et 500 euros selon la qualité des composants et les fonctionnalités désirées. Un kit de base pour débutant coûte environ 200-250 euros, tandis qu’un setup FPV racing complet avec lunettes immersives peut atteindre 600-800 euros. L’avantage du DIY est que vous pouvez commencer avec l’essentiel et ajouter progressivement des améliorations.
Faut-il des compétences particulières pour construire un drone ?
Des bases en électronique et en soudure facilitent grandement le projet, mais elles ne sont pas indispensables. De nombreux tutoriels vidéo détaillés permettent aux débutants motivés d’apprendre au fur et à mesure. Comptez 5 à 10 heures pour votre premier assemblage. La configuration logicielle via Betaflight suit une interface graphique assez intuitive avec de nombreuses ressources communautaires disponibles.
Combien de temps faut-il pour assembler un drone de A à Z ?
Pour un premier montage, prévoyez entre 6 et 12 heures réparties sur plusieurs sessions. Cela inclut : le montage mécanique du châssis et des moteurs (2-3h), les soudures et le câblage (3-5h), la configuration logicielle (2-3h), et les tests/ajustements (1-2h). Avec l’expérience, vous pourrez assembler un drone en 3-4 heures seulement.
Mon drone DIY a-t-il besoin d’être enregistré légalement ?
En France et dans l’Union Européenne, tout drone de plus de 250 grammes doit être enregistré auprès de la DGAC. Vous devrez également passer une formation en ligne gratuite pour obtenir votre attestation de pilote. Respectez les zones de vol autorisées et les règles de hauteur maximale (120 mètres). Pour les détails précis, consultez [AlphaTango – Lien externe vers site DGAC] qui recense la réglementation à jour.
Que faire si mon drone ne décolle pas après l’assemblage ?
Vérifiez dans l’ordre : 1) Les hélices sont-elles dans le bon sens de rotation ? 2) Les moteurs tournent-ils dans le sens correct selon le schéma Quad X ? 3) Le mode ARM est-il activé sur votre radiocommande ? 4) La batterie est-elle suffisamment chargée (au-dessus de 3,7V/cellule) ? 5) Le contrôleur de vol est-il correctement calibré ? Testez chaque moteur individuellement dans Betaflight (sans hélices) pour isoler le problème.
Sources et ressources complémentaires :
- [Équipement de drones FPV pour les courses de drones FPV]
- [Betaflight : Documentation officielle – ici]






